近日,輪機工程學院徐敏義團隊在《Nano Research》上發(fā)表最新研究論文"Highly adaptive triboelectric tactile sensor on the foot of autonomous wall-climbing robots for detecting the adhesion state and avoiding the hazard"。這項工作提出了一種高適應(yīng)性摩擦電觸覺傳感器,用于檢測腿足式磁吸附爬墻機器人的磁吸附狀態(tài),提高機器人自主爬行的避障能力和安全性。
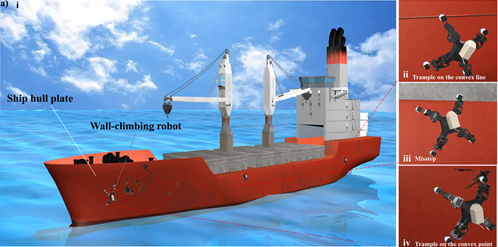
目前,腿足式磁吸附爬壁機器人因其高靈活性而成為船體檢測的重要工具。然而,由于船舶的鐵磁性金屬外板通常具有復雜的結(jié)構(gòu),包括各種腐蝕點,裂紋和焊縫,機器人在攀爬過程中存在脫落的風險。因此,確保腿足式磁吸附機器人能夠穩(wěn)定的吸附在鐵磁性壁面上,并在足部電磁鐵與壁面之間建立有效的接觸,對于腿足式爬壁機器人的穩(wěn)定運動至關(guān)重要。為了解決這一問題,迫切需要開發(fā)一種傳感器來監(jiān)測機器人運動過程中足部的磁吸附狀態(tài)。
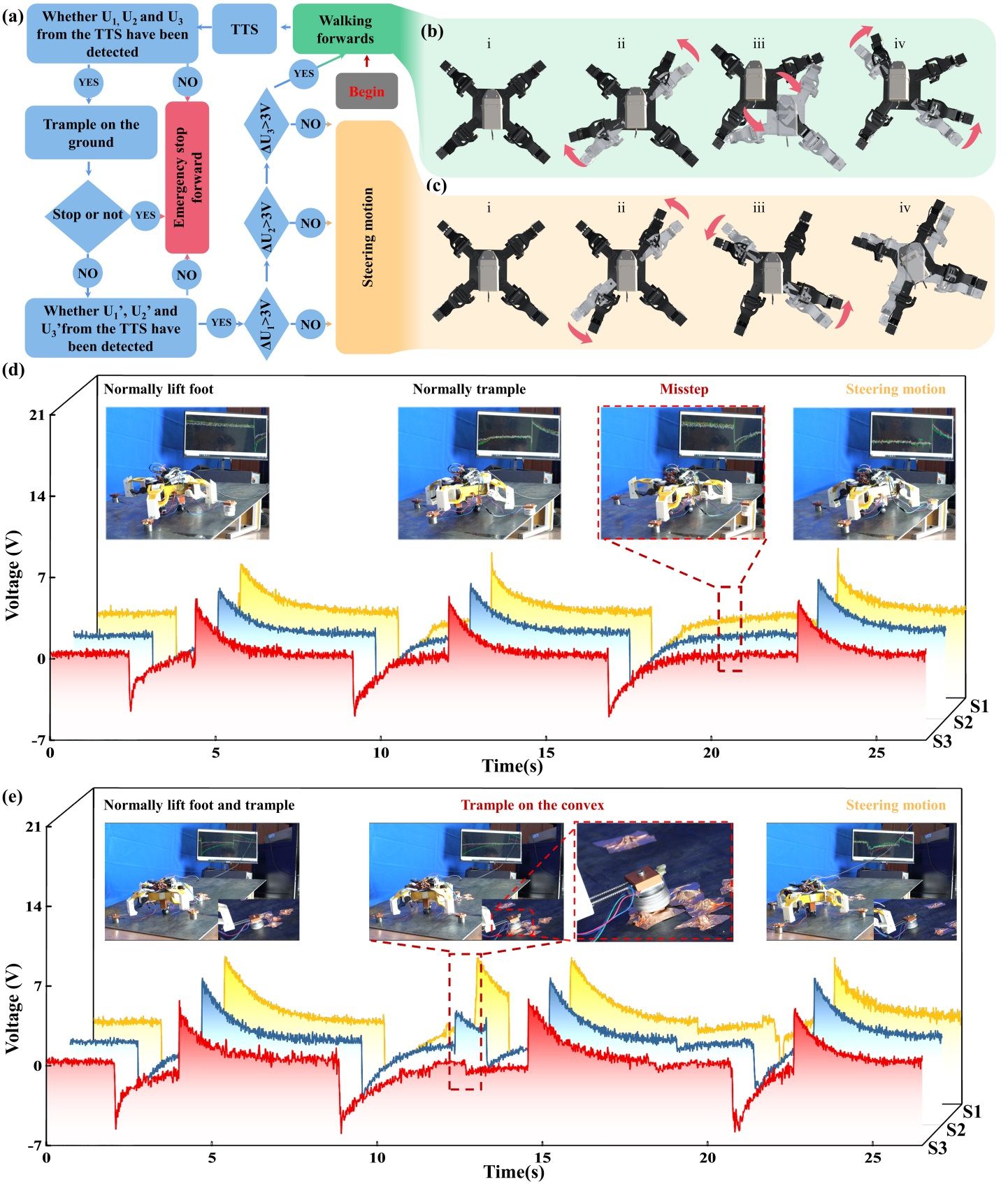
徐敏義教授團隊針對腿足式磁吸附爬壁機器人無法感知磁吸附狀態(tài)的問題,提出了一種用于腿足式爬壁機器人的足部觸覺傳感器,采用3D打印外殼、觸覺滑塊和三個等距傳感單元組成的結(jié)構(gòu)設(shè)計實現(xiàn)了既不影響機器人足部的正常吸附,又能夠感知機器人足部的磁吸附狀態(tài)。本文開展了觸覺傳感器在觸覺滑塊不同的滑動頻率和滑動深度情況下的性能實驗,實驗表明觸覺傳感器能夠監(jiān)測觸覺滑塊的滑動深度并控制LED信號燈。此外,在監(jiān)測機器人足部吸附狀態(tài)的演示實驗中,摩擦電觸覺傳感器對各種鐵磁壁面具有較強的適應(yīng)性,并建立了機器人步態(tài)控制系統(tǒng),驗證了摩擦電觸覺傳感器的反饋控制能力。結(jié)果表明,安裝了摩擦電觸覺傳感器的機器人能夠識別爬行壁上的危險區(qū)域并自主規(guī)避危險。
最后,將摩擦電觸覺傳感器安裝于四足磁吸附爬壁機器人足部,當機器人踩踏到鋼板上模擬的焊接接縫和腐蝕性凸點時,機器人通過觸覺傳感器感知到的異常信號能夠自動的更換步態(tài),從而避免因機器人足部無法形成穩(wěn)定磁吸附導致的整機脫落的風險;同時,在機器人踏空后,機器人也能夠感知到異常信號并自主避險。本文的研究成果提供了一種具有應(yīng)用前景的用于腿足式磁吸附爬壁機器人足部吸附狀態(tài)監(jiān)測的觸覺傳感器,機器人通過識別傳感器的異常信號進行自主避險,對于腿足式磁吸附爬壁機器人穩(wěn)定的自主爬行在復雜鐵磁性壁面上具有重要意義。
Nano Research重點關(guān)注納米材料科學的基本研究和實際應(yīng)用,由清華大學和中國化學會主辦,是由清華大學出版社和Springer聯(lián)合出版的一本跨學科國際學術(shù)期刊。論文的共同第一作者為大連海事大學輪機工程學院2021級碩士研究生王昭洋、2023級博士研究生劉建華和2020級碩士研究生王梓聿,論文的通訊作者為北京大學工學院博士后徐鵬和大連海事大學輪機工程學院徐敏義教授。
原文鏈接:https://doi.org/10.1007/s12274-024-6537-1

 English
English


 最新動態(tài)
最新動態(tài)